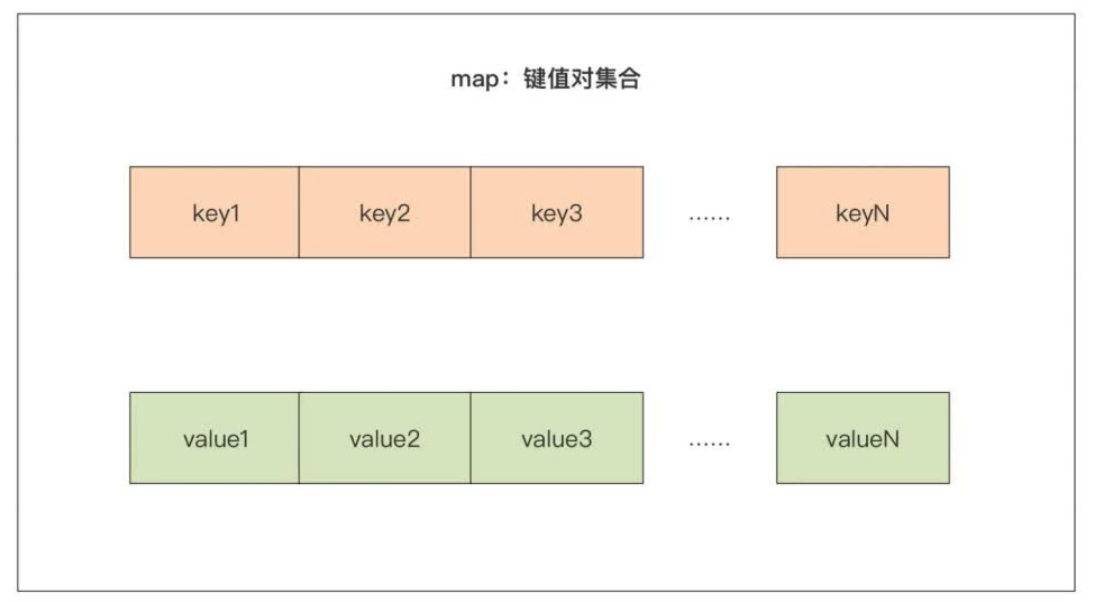
什么是Map
map 是 Go 语言提供的一种抽象数据类型,它表示一组无序的键值对。
map的声明:
1 | map[key_type]value_type |
key 与 value 的类型可以相同,也可以不同:
1 | map[string]string // key与value元素的类型相同 |
如果两个 map 类型的 key 元素类型相同,value 元素类型也相同,那么我们可以说它们是同一个 map 类型,否则就是不同的 map 类型。
map 类型对 value 的类型没有限制,但是对 key 的类型却有严格要求,因为 map 类型要保证 key 的唯一性。Go 语言中要求,key 的类型必须支持“==”和“!=”两种比较操作符。
在Go语言中,函数类型、map类型本身,以及切片只支持与nil的比较,而不支持同类型两个变量的比较:
1 | func main() { |
结论:函数类型、map 类型自身,以及切片类型是不能作为 map的 key 类型的。
map基本操作
声明
1 | // 声明一个map |
使用复合字面值初始化 map 类型变量
1 | m := map[int]string{} |
使用 make 为 map 类型变量进行显式初始化
1 | m1 := make(map[int]string) // 未指定初始容量 |
插入新键值对
1 | m := make(map[int]string) |
获取键值对数量
1 | func main() { |
注意:我们不能对 map 类型变量调用 cap,来获取当前容量。
查找和数据读取
1 | v, ok := m["key1"] |
在 Go 语言中,请使用“comma ok”惯用法对 map 进行键查找和键值读取操作。
删除数据
1 | fmt.Println(m) // map[key1:1 key2:2 key3:3] |
注意:delete 函数是从 map 中删除键的唯一方法。即便传给 delete 的键在map 中并不存在,delete 函数的执行也不会失败,更不会抛出运行时的异常。
遍历 map 中的键值数据
像对待切片那样通过 for range 语句对 map 数据进行遍历:
1 | fmt.Printf("{ ") |
map的内部实现
Go 运行时使用一张哈希表来实现抽象的map 类型。运行时实现了 map 类型操作的所有功能,包括查找、插入、删除等。在编译阶段,Go 编译器会将 Go 语法层面的 map 操作,重写成运行时对应的函数调用。
1 | // makemap implements Go map creation for make(map[k]v, hint). |
map 类型在 Go 运行时层实现的示意图
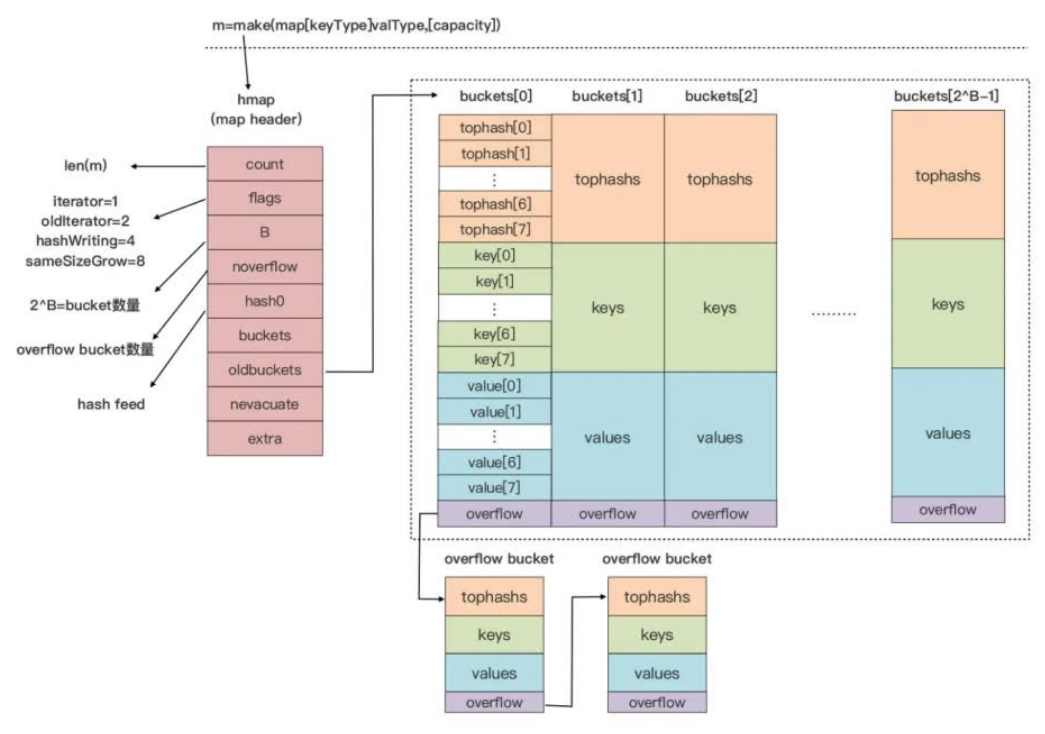
初始状态
与语法层面 map 类型变量(m)一一对应的是 runtime.hmap 的实例。
hmap 类型是 map 类型的头部结构(header),也就是map 类型的描述符,它存储了后续 map 类型操作所需的所有信息,包括: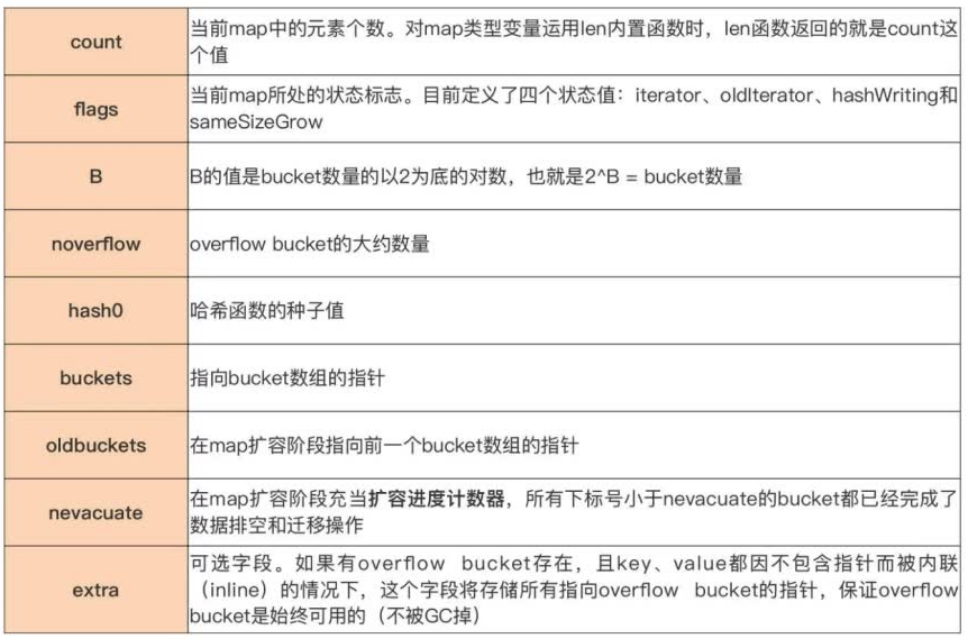
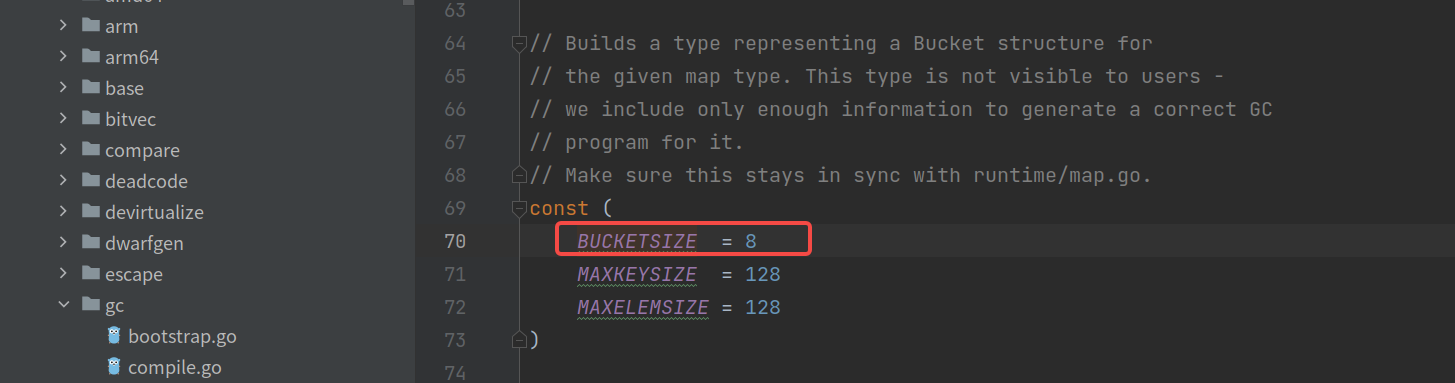
真正用来存储键值对数据的是桶,也就是 bucket,每个 bucket 中存储的是 Hash 值低
bit 位数值相同的元素,默认的元素个数为 BUCKETSIZE(值为 8,在$GOROOT/src/cmd/compile/internal/gc/reflect.go 中定义,与 runtime/map.go 中常量 bucketCnt 保持一致)
当某个 bucket(比如 buckets[0]) 的 8 个空槽 slot)都填满了,且 map 尚未达到扩容的条件的情况下,运行时会建立 overflow bucket,并将这个 overflow bucket 挂在上面bucket(如 buckets[0])末尾的 overflow 指针上,这样两个 buckets 形成了一个链表结构,直到下一次 map 扩容之前,这个结构都会一直存在。
从图中我们可以看到,每个 bucket 由三部分组成,从上到下分别是 tophash 区域、
key存储区域和 value 存储区域。
tophash 区域
当我们向 map 插入一条数据,或者是从 map 按 key 查询数据的时候,运行时都会使用哈希函数对 key 做哈希运算,并获得一个哈希值(hashcode)。这个 hashcode 非常关键,运行时会把 hashcode“一分为二”来看待,其中低位区的值用于选定 bucket,高位区的值用于在某个 bucket 中确定 key 的位置。
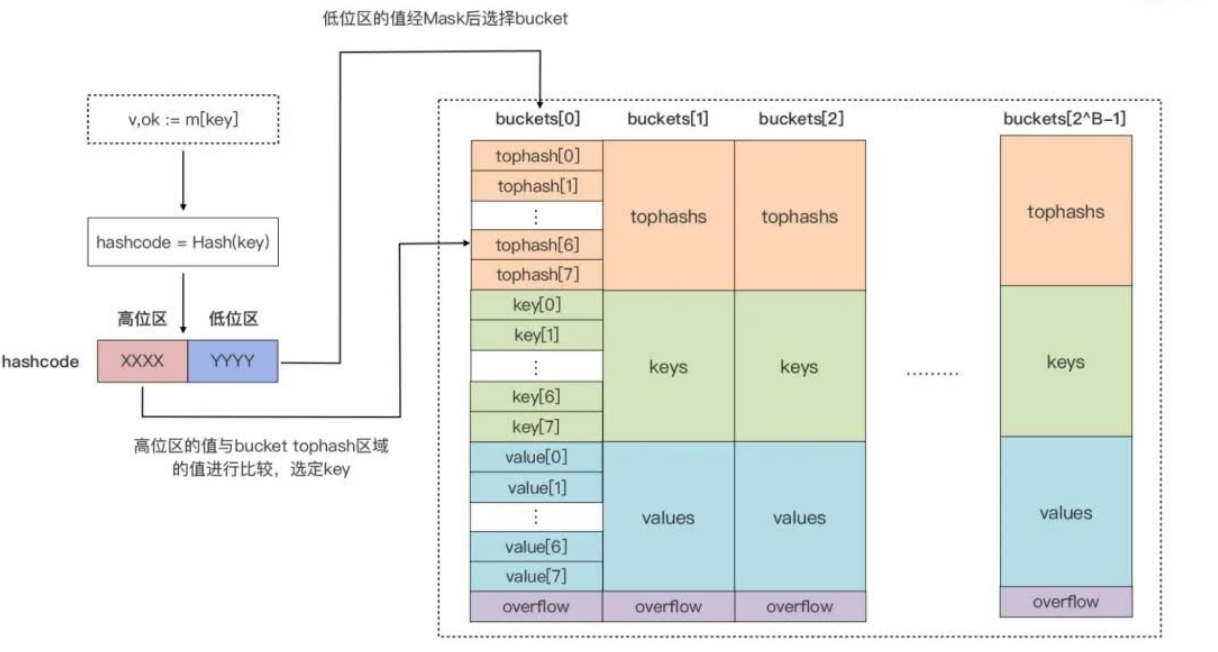
因此,每个 bucket 的 tophash 区域其实是用来快速定位 key 位置的,这样就避免了逐个key 进行比较这种代价较大的操作。尤其是当 key 是 size 较大的字符串类型时,好处就更突出了。这是一种以空间换时间的思路。
key 存储区域
tophash 区域下面是一块连续的内存区域,存储的是这个 bucket 承载的所有 key 数据。运行时在分配 bucket 的时候需要知道 key 的 Size。——Go 运行时就是利用 maptype 参数中的信息确定 key 的类型和大小的。
1 | type maptype struct { |
value 存储区域
key 存储区域下方的另外一块连续的内存区域,这个区域存储的是 key 对应的 value。
和 key 一样,这个区域的创建也是得到了 maptype 中信息的帮助。Go 运行时采用了把 key 和 value 分开存储的方式,而不是采用一个 kv 接着一个 kv 的 kv 紧邻方式
存储,这带来的其实是算法上的复杂性,但却减少了因内存对齐带来的内存浪费。
我们以 map[int8]int64 为例,看看下面的存储空间利用率对比图: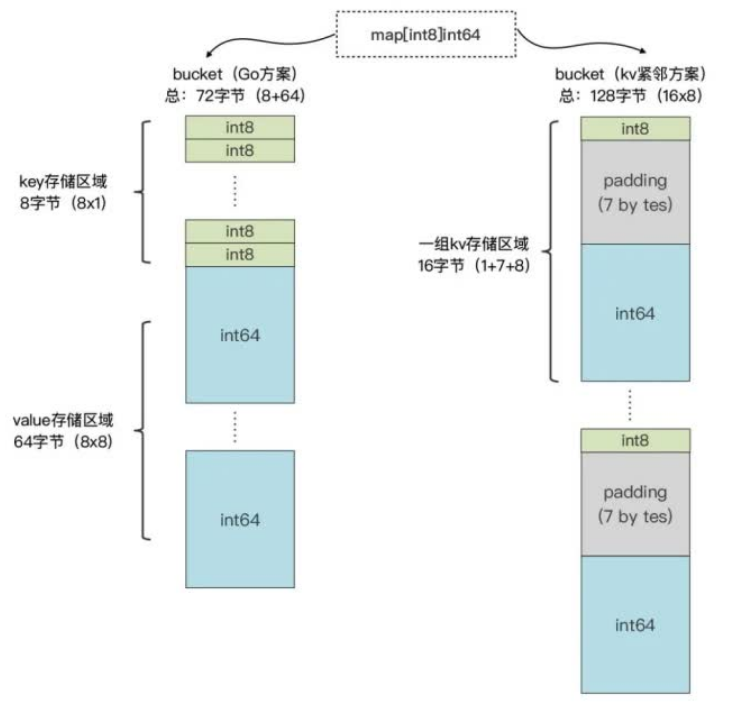
当前 Go 运行时使用的方案内存利用效率很高,而 kv 紧邻存储的方案在map[int8]int64 这样的例子中内存浪费十分严重,它的内存利用率是 72/128=56.25%,有近一半的空间都浪费掉了。
注意:如果 key 或 value 的数据长度大于一定数值,那么运行时不会在 bucket 中直接存储数据,而是会存储 key 或 value 数据的指针。
目前 Go 运行时定义的最大 key 和 value 的长度是这样的:
1 | // $GOROOT/src/runtime/map.go |
map扩容
map 会对底层使用的内存进行自动管理。
因此,在使用过程中,当插入元素个数超出一定数值后,map 一定会存在自动扩容的问题,也就是怎么扩充 bucket 的数量,并重新在 bucket 间均衡分配数据的问题。
那么 map 在什么情况下会进行扩容呢?
Go 运行时的 map 实现中引入了一个LoadFactor(负载因子),当count > LoadFactor * 2^B或 overflow bucket 过多时,运行时会自动对 map 进行扩容。
目前 Go 最新 1.17 版本以上 LoadFactor 设置为6.5(loadFactorNumloadFactorDen)。
1 | // $GOROOT/src/runtime/map.go |
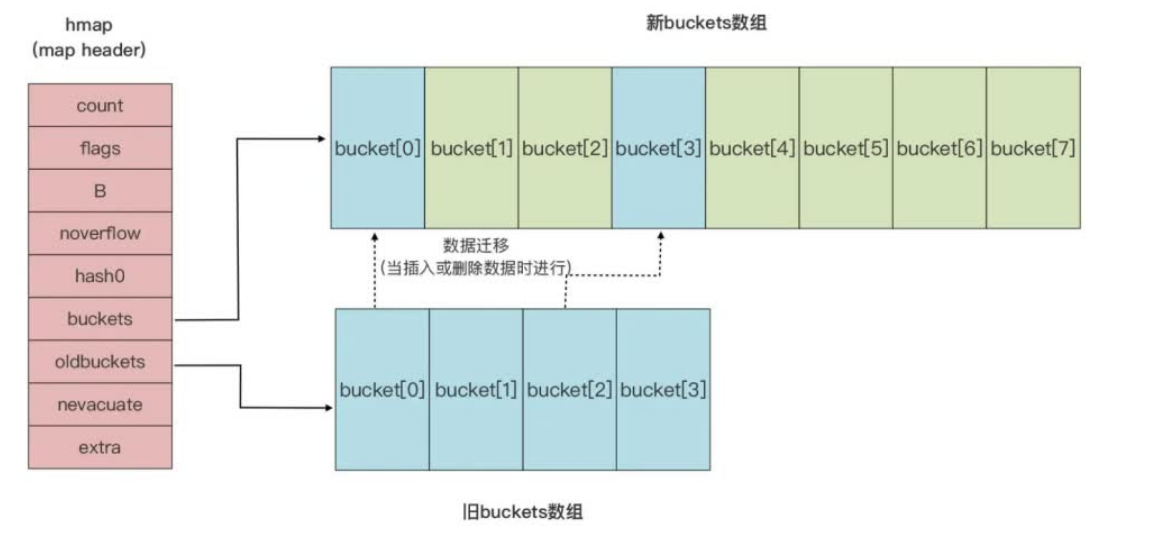
如果是因为 overflowbucket 过多导致的“扩容”,实际上运行时会新建一个和现有规模一样的 bucket 数组,然后在 assign 和 delete 时做排空和迁移。
如果是因为当前数据数量超出 LoadFactor 指定水位而进行的扩容,那么运行时会立一个两倍于现有规模的 bucket 数组,但真正的排空和迁移工作也是在 assign 和 delete 时逐步进行的。原 bucket 数组会挂在 hmap 的 oldbuckets 指针下面,直到原 buckets 数组中所有数据都迁移到新数组后,原 buckets 数组才会被释放。
map与并发
从上面的实现原理来看,充当 map 描述符角色的 hmap实例自身是有状态的(hmap.flags),而且对状态的读写是没有并发保护的。所以,map实例不是并发写安全的,也不支持并发读写。
1 | package main |
如果我们仅仅是进行并发读,map 是没有问题的。
Go 1.9 版本中引入了支持并发写安全的 sync.Map 类型,可以用来在并发读写的场景下替换掉 map。
注意:考虑到 map 可以自动扩容,map 中数据元素的 value 位置可能在这一过程中发生变化,所以Go 不允许获取 map 中 value 的地址,这个约束是在编译期间就生效的。
1 | p := &m[key]//can not take the address of m[key] |