任务
数字三角形问题
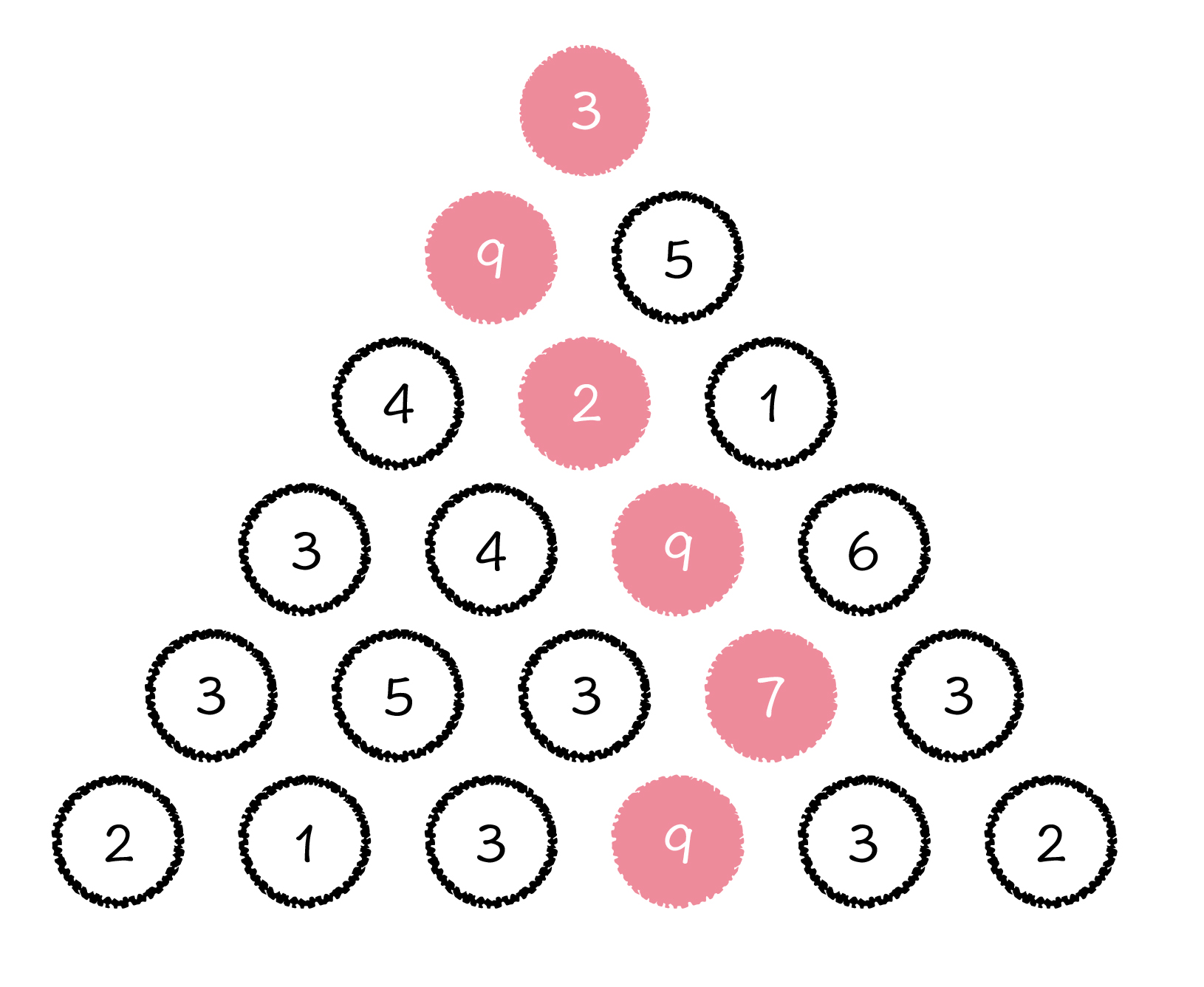
由上到下,第 i 层由 i 个数字组成,目标从第 1 层开始,每次只能向下走到相邻的两个节点,求走到最后一层路径上面数字的最大和值是多少。就像图中标红的一条线路,就是路径和值最大的一条路线,和值为 39。如果给你的是一个 n 层的数字三角形,你该如何解决这个问题呢?
数学归纳法思想
如果我们已知到第三层所有点的最大值,那么我们就可以计算得到起始点到第四层每一个的路径最大和值。所有绿色节点和蓝色节点,就是已经求出来的,起始点到其路径最大和值的点。其中的数字是根据上图中的数字三角形计算所得,比如第 2 层的 12,是由图 1 中第 1 层的 3 与原所在位置的 9,相加之和的结果。
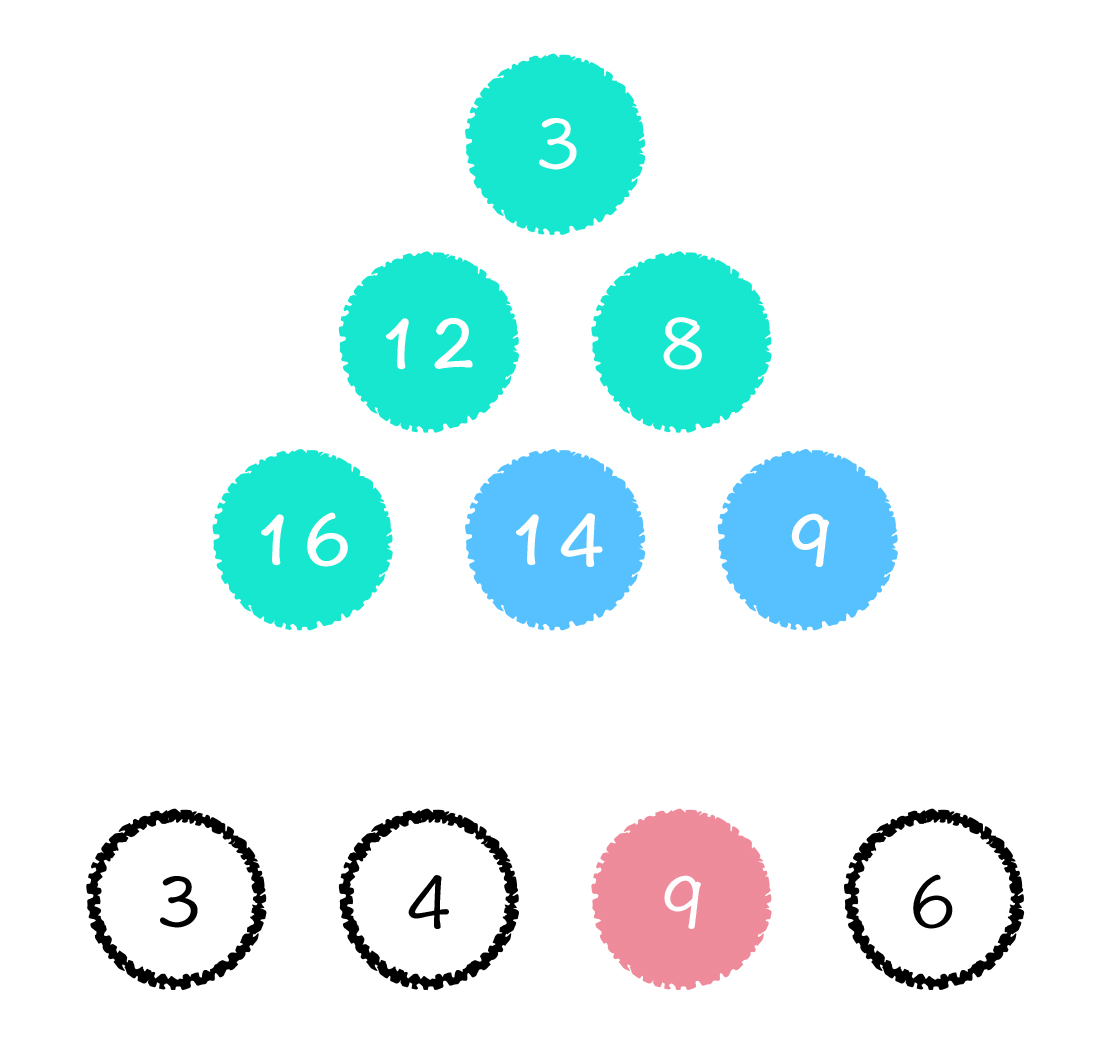
如果想求从起始点到红色的点,也就是第 4 行数字 9 点的路径最大和值,那么根据数字三角形的规则,我们只能从图中的两个蓝色点转移到红色点。那究竟选择从哪个点走到红色点呢?当然是选择其中和值较大的了,也就是从和值为 14 的点转移到红色点,得到的就是起始点到红色点的路径最大和值。
总结
若我们已知从起始点到第 i - 1 层上每个点的路径最大和值,那我们又是怎么得到从起始点到第 i 层上每个点的路径最大和值呢?请看下图:
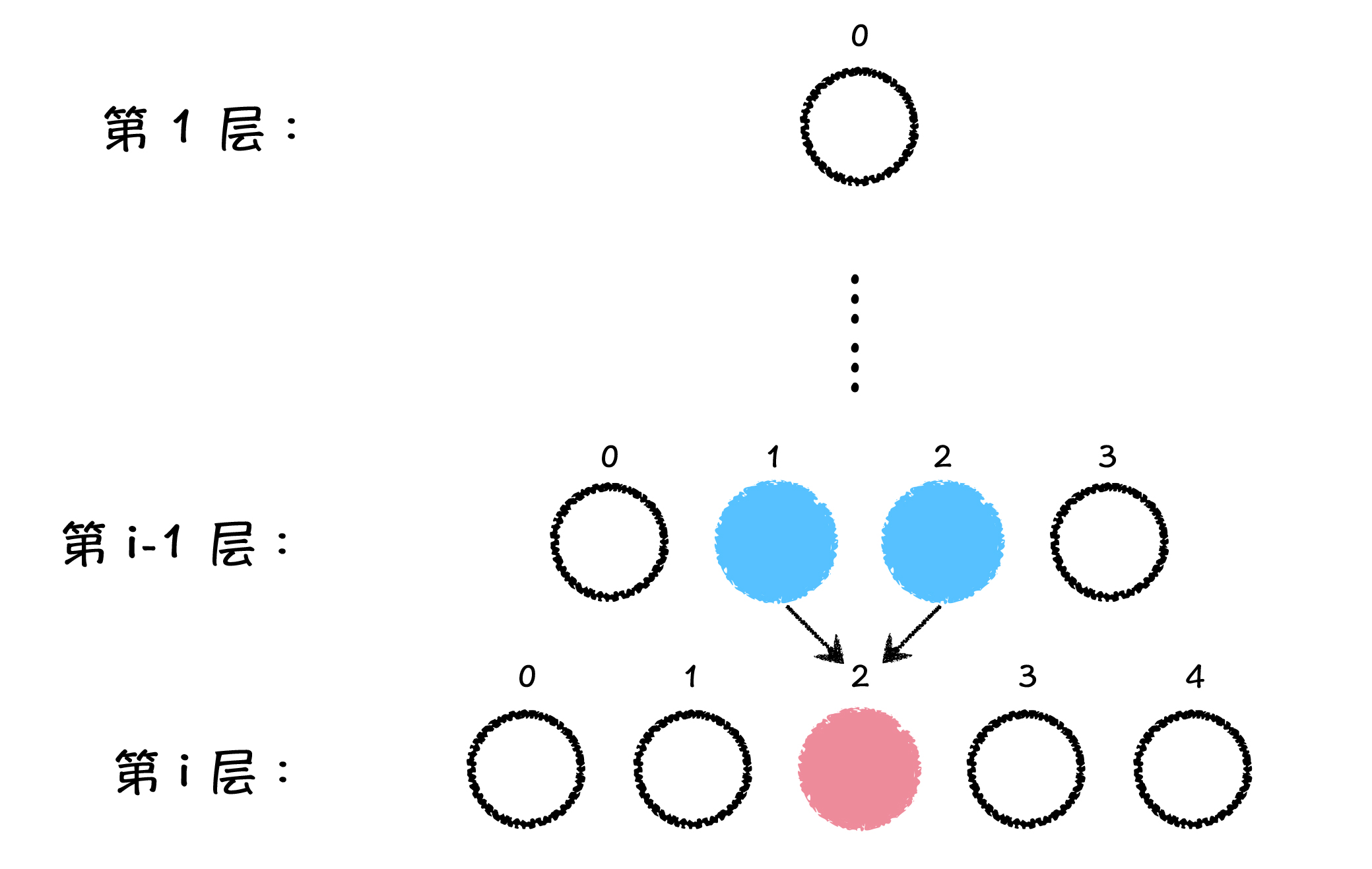
我们给每一层的节点,从左向右,从 0 开始依次编号,那么第 i 行的第 3 个点对应的坐标就是 (i, 2) 点。从第 1 层的点想要到达红色 (i, 2) 点,可以通过 (i - 1, 1) 点到达,或者通过 (i - 1, 2) 点到达。在已知从起始点到第 i-1 层上每个点的路径最大和值的前提下,从第 1 层到 (i, 2) 点的最大和值,就是在 (i - 1, 1) 和 (i - 1, 2) 这两个值中,选择一个路径和值最大的,然后转移到 (i, 2) 点,即为第 1 层到 (i, 2) 点的路径最大和值。
所以,我们基本可以确定一件事情了,如果我们要是知道第 1 层 到 i - 1 层的每个点的路径最大和值,那就很容易求得到第 i 层每个点的路径最大和值,从而推导出 i + 1 层、i + 2 层等等的路径最大和值,直到最后一层。
又因为,我们已知第 1 层到第 1 层每一个点的路径最大和值,就是起始点原本的值,所以沿着上面这个思路,就可以按照层序,来求解第一层到每一层的每个节点的路径最大和值了。
动态规划算法的四步走
状态定义
理解一个动态归划问题的状态定义,是理解其解法的第一步,也是最重要的一步。如果你在往下进行推导的时候,发现进行不下去了,那往往就是状态定义有问题,这时你就需要回到这个第一步,琢磨琢磨新的状态定义了。
并且,我们一直在强调,对于动态规划的状态定义,不仅仅是要一个数学符号,还要一个明确的语义信息,你的理解可能是:不同的语义信息,对应的不就是不同的数学符号么?那今天,我们就用同一个数学符号,表示不同的语义信息,在接下来的求解过程中,你会发现这两种不同的语义信息,所衍生出来的后续步骤过程,是完全不同的。
回到前面说的数字三角形问题,我们可以作出两种状态定义:
第一种状态定义:dp[i][j] 代表从起始点,到 (i, j) 点的路径最大值。
第二种状态定义:dp[i][j] 代表从底边的某个点出发,到 (i, j) 点的路径最大值。
为了后续讲解方便,我们假设所有坐标都是从 1 开始的,也就是第一行第一个点的坐标是 (1, 1)。你会发现,这两种状态定义,数学符号都是 dp[i][j],而含义却完全相反,一个是从顶向下走,一个是从底向上走。对于第一种状态定义,如果数字三角形有 n 层的话,问题所求的最大值,就是在最后一层 dp[n] 中的某个值。而第二种状态定义,问题所求的最大值最终会存储在 dp[1][1] 这个状态值中。
状态转移方程
状态转移,就是状态之间的转移,每一个状态的含义,在状态定义中规定的明明白白,而状态与状态之间的转移方式,是需要根据具体的问题以及具体的状态定义,进行具体分析。
根据刚才作的两种状态定义,我们可以分别画出来这样两种状态转移的方向:
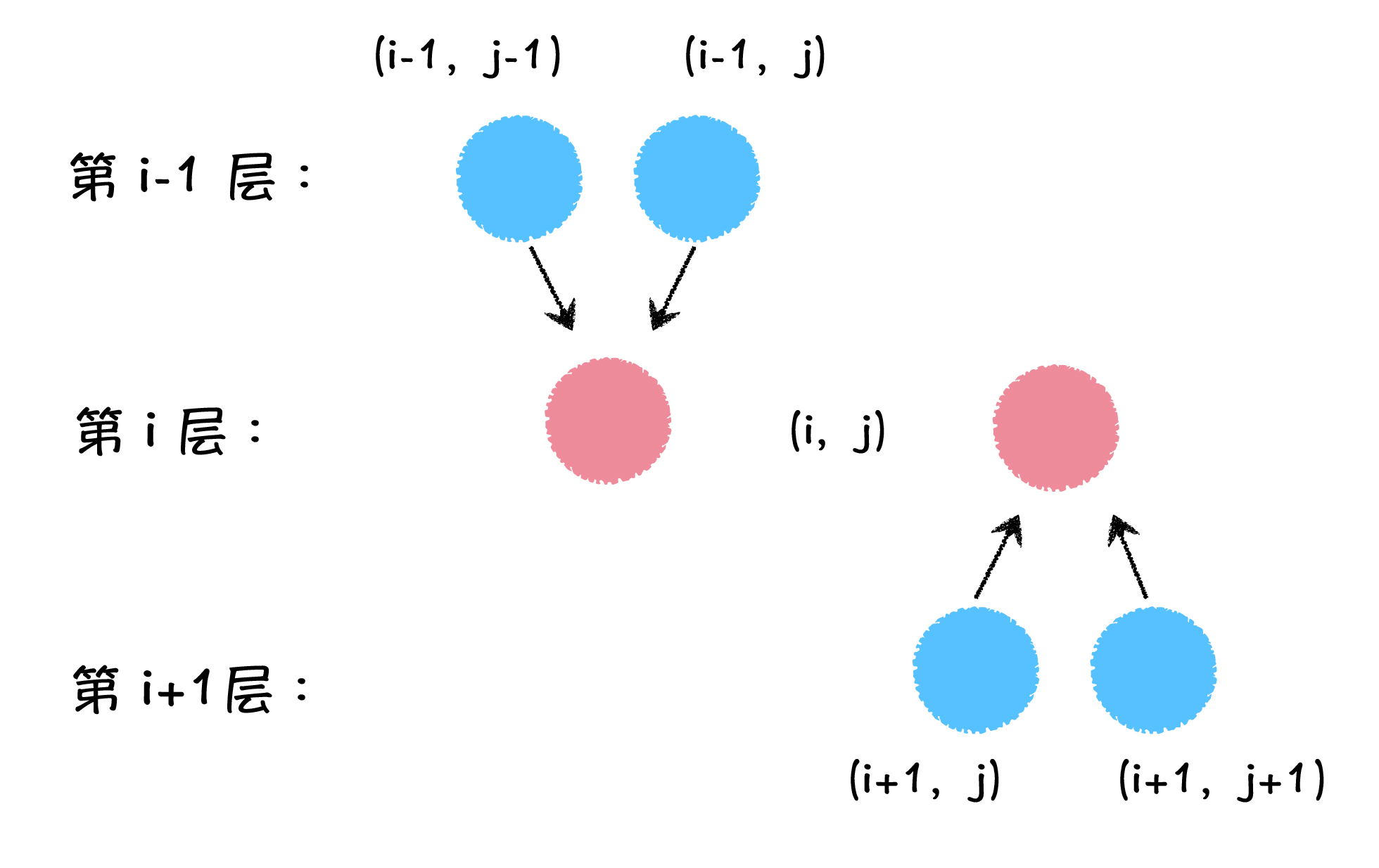
如图所示,我以左边是第一种状态定义下的状态转移方向为例,来说明它是如何转移的。首先,它是自上向下转移的,所以想要求得 dp[i][j] 的值,我们需要知道 dp[i - 1][j - 1] 和 dp[i - 1][j] 的值。因为按照“走向下个相邻两点”的规则,只有 (i - 1, j - 1) 和 (i - 1, j) 这两个点,才能能走到 (i, j),也就是我们讲到的转移到 (i, j) 点。右边的第二种状态定义转移过程和左边的一样,只是移动方向不一样而已。
所以,根据两种状态定义,我们可以分别列出这两种状态转移方程:
第一种状态转移方程:dp[i][j] = max(dp[i - 1][j - 1], dp[i - 1][j]) + val[i][j]
第二种状态转移方程:dp[i][j] = max(dp[i + 1][j], dp[i + 1][j + 1]) + val[i][j]
两种转移方程,都是在能够转移到 (i, j) 点的状态值中选择一个较大值,再加上 (i, j) 原本的数值 val[i][j],就是各自起始点到达 (i, j) 点的路径最大值,也就是两种状态定义下的 dp[i][j] 的值。
到这里,你可以看出,状态定义不一样,直接导致我们的状态转移方程就不一样。所以,虽然是相同的数学符号,定义的含义不同,就会造成后续的解法不同,同时也意味着解决问题的难度不同。
正确性证明
关于状态转移方程的正确性证明,借助的就是程序设计中最重要的数学思维:数学归纳法。
根据数学归纳法的三步走,我们试着证明一下第一种状态转移方程是正确的,也就是自上而下的状态转移方式。
第一步,我们已知在这种状态转移方式中,第一个阶段中的所有 dp 值都可以轻松获得,也就是可以很轻松的初始化 dp[1][1] 的值,应该等于 val[1][1] 的值。
第二步,我们假设如果第 i-1 阶段中的所有状态值,我们都正确的得到了。也就是正确的得到了从起始点到 i-1 层中每个点的路径最大和值。那根据状态转移方程:dp[i][j] = max(dp[i - 1][j], dp[i - 1][j + 1]) + val[i][j] 来说,就可以正确的计算得到第 i 个阶段中的所有状态值。
第三步,两步联立,就可得出结论,所有阶段中的状态值计算均正确。那么,从起始点到底边的路径最大和值,就在最后一个阶段的若干个状态值中。
程序设计与实现
1 |
|
小结
- 状态定义,是动态规划算法的重点,无论是解题还是学习,都要从这一步开始。
- 不同的状态定义,决定了不同的状态转移方程,同时也可能代表了不同的解题难度,所以,学习如何定义优秀的状态很重要。
- 动态规划中的状态转移顺序,是建立在“阶段”概念之上的,只有本阶段的状态值计算完了,下一个阶段的状态值才能得以计算。
- 数学归纳法,是证明动态规划状态转移方程正确性的利器,掌握了它,会让你的动态规划学习过程事半功倍!